Introduction
Background
Across a variety of fields, the usage of single-board computers is an growing trend, most notably in industrial automation, aerospace, and among hobbyists(Insights 2021). In many amateur electronics circles, due to its small form factor and wide range of common peripherals, the Raspberry Pi is a highly used System-on-a-Chip (SoC) producing 7 million units in 2021(Pounder 2021).
Currently, the Default Operating System for the Raspberry Pi, Raspbian, only focuses on a user-driven experience which introduces additional overhead on process usage and nondeterministic process execution(Foundation, n.d.; FreeRTOS, n.d.). Alternative Operating Systems advertised for the Raspberry Pi such as Lakka, Retro-Pie, and Ubuntu Core tout a similar goal–focusing on providing a strong user experience in a general-purpose operating system. Specifically, these general purpose operating systems focus on providing a system the maximizes its responsitivity to the user, i.e. minimizes screen freezes or input delays. This goal means that the operating systems are typically non-deterministic and so execution times of various processes may vary considerably when executing the same task under the same conditions. Apart from the general purpose operating systems for the Rasbperry Pi, there are a few in-progress RTOS projects such as Trampoline OS, which mentions that a port for the Cortex-A7 (the Raspberry Pi 2B board) which is under development, or RODOS, which provides a middleware layer to be run atop of Linux.
What is a Real-Time Operating System
Real-Time Operating Systems are characterized by deterministic, bounded, and low latency processing with a scheduling system that is able to meet deadlines(Casini et al. 2019; FreeRTOS, n.d.; Wirth 1977). Two common scheduler strategies are event driven scheduling, which implements a preemptive scheduler using fixed prioritization of tasks, or round-robin scheduling, where tasks are switched at regular time-intervals. In this paper, we will be presenting a system that conforms to the event-driven system paradigm, with fixed priorities assigned to tasks and the scheduler has the ability to preempt lower priority tasks in favor of executing a new higher priority task. Preemption is important so that the system is always running the highest priority task at any given time, one of the foundational pillars of an RTOS. The RTOS may temporarily violate this condition to prevent priority inversion from occurring, by running a lower-priority task, in a deterministic manner, until it releases a critical resource required by a higher priority task. The bounded execution times, strict prioritization, and deterministic behavior makes RTOSs well suited for real-time system requirements.
About the System
The target system of this paper is the Raspberry Pi 2B (v1.1) which contains an ARMv7-A processor, the ARM Cortex-A7 CPU, and 1 gigabyte of RAM. Additionally, the system provides numerous peripherals such as 4 USB ports, 1 ethernet port, 1 audio jack, 1 HDMI port, and 40 GPIO pins that can facilitate UART and two SPI(Broadcom 2012). The wide range of peripherals allows flexibility for accessing different types of resources from the system and enables the system to interact with the real-world.
ARM generally divides their processors into A, M, and R-series. The A series targets rich operating systems which contain MMUs, the M series targets low-power IoT applications, and the R series focuses on high performance and hard real-time applications. The Raspberry Pi falls into this A series, which is why this RTOS is primarily oriented towards hobbyists(ARM 2020b).
In order to boot Raspberry Pi 2B, a micro SD is required(Wiki, n.d.a, n.d.b). The SD’s first partition must be formatted to a FAT filesystem, containing the proprietary GPU boot blobs in the root directory: bootcode.bin, start.elf. Including a config.txt allows the system to be further configured at boot from a simple text file with values that are discussed in the Raspberry Pi documentation(Allan 2021). In order to load an operating system/ kernel to the Raspberry Pi, the SD card must also contain a kernel7.img1 in the root directory. Then, after inserting the SD-card and applying power, the Raspberry Pi firmware will:
Turn its GPU on
Load the first stage bootloader from the ROM
Load the second stage bootloader from bootcode.bin
Load the GPU firmware from start.elf
Configure any supported aspect of the system from the specifications in the config.txt
Load the kernel from kernel7.img
Begin executing at address 0x8000 in Hypervisor mode and park the 3 other cores
The kernel7.img and the config.txt are the two files that are changed when loading different operating systems. In our case, we only use the config.txt to ensure that the UART clock is set to 3MHz so that we can provide a fixed 19200 baud for the UART. Jobbed is then compiled to and loaded in through the kernel7.img.
In order to build the kernel7.img the ARM cross compiler I used was the GNU Compiler Collection with no Embedded-Application Binary Interface: gcc-arm-none-eabi to compile the C and ARM-Assembly into ARM instructions while working on x86-based machines. I also used QEMU, an emulator that provides a Raspberry Pi 2B emulator, to quickly test the source code while I was on my x86 machines. While working on QEMU, I noted that the emulator fails to benchmark timings correctly and so all of the benchmarking in sections IV-V was done on a physical Raspberry Pi 2B for both Raspbian and Jobbed to ensure that the timings were accurate and comparable.
ARM Execution Modes
The Raspberry Pi 2B contains a Cortex-A7 Processor. This Cortex-A7 processor has 8 different execution modes which control what registers the CPU uses, the privilege level, and status registers(ARM, n.d.).
| Mode | Use |
|---|---|
| User | Run Threads in an Unprivileged Mode |
| FIQ | Lower Latency Interrupt Handler |
| IRQ | Handle an Interrupt |
| SVC | Handle Systemcalls, i.e. Supervisor Calls |
| ABT/UND | System Error State Modes |
| HVC | High Privilege mode, used in Virtualization |
| SYS | Identical to USR mode but with system privileges |
These modes are useful so that when system interruptions occur while a thread is running, such as a signal from the GPIO pins or a delayed execution timer, the current execution state can be preserved and then restored at a later time. This is especially useful if the interrupt creates a higher priority thread because the new thread can be run in a clean state while the preserved execution state can be stored in memory so that the new thread execution does not tarnish the state of the previously running thread.
Additionally, the user mode is useful because threads are not able to directly access the coprocessor states, which can change things like the timer frequencies and thus alter the timing of the tasks. Since the user mode has no privileges, the scheduler can use the SYS mode to setup the registers, stack, and linking register of the user state and then be able to use its privilege to switch back to the intermediate SVC state utilized by the scheduler.
Another benefit of these modes is that the USR mode has restricted access to different memory regions when the MMU is initialized. In RTOSs, this memory privilege separation is not as emphasized unless the system is going to be put into an untrusted network. Jobbed initializes the MMU for one primary reason – to use the Cortex-A7 exclusive monitors for concurrency purposes. The exclusive monitors in the Cortex-A7 allows a process to read and mark and address as an exclusive access, so that when it goes to store data back into that address, it can tell if the original data was changed by another process. This is important for shared memory, such as mutexes and semaphores, since they may be locked or waited on by different processes, and so the data could have been modified between the load and the store instructions. These exclusive access monitors are enabled when the MMU has been initialized, and so Jobbed initializes the MMU, setting the permissions on all the pages of memory that it statically loads (text, data, bss) and the stack spaces reserved for the system’s threads, to take advantage of them. This simplistic approach to memory management makes it easy to tighten control on critical memory regions if the application running on the RTOS requires it since the initialization flag can be changed to PRIVILEGED_ACCESS_ONLY (0b01) in the kernel/lib/mmu source.
Another way that concurrency could have been established is by using the Cortex-A7 atomic swap SWP, which allows values to be swapped atomically. In the mutex case, this would allow the process to immediately tell if it was successful in locking the resource. The disadvantage to the ARM atomic swap instruction is that it locks out a bus in order to ensure the atomicity of the operation, which is non-ideal for a responsive system(Goodacre and Sloss 2005). This is the primary reason that ARM had deprecated this method in favor of the exclusive monitoring in ARMv6(ARM 2020a).
How to Evaluate a Real-Time Operating System[sec:rtoseval]
In their paper, Which is the best RTOS for Drones? Evaluation of Real-Time Characteristics of Nuttx and ChibiOS, Zhang and Timmerman propose 4 broad categories of tests for an RTOS encompassing overheads, threads, mutexes, and semaphores(Zhang et al. 2021).
Overhead Test
The overhead tests, also mentioned in David’s paper Context switch overheads for Linux on ARM platforms, seek to answer the question(David, Carlyle, and Campbell 2007):
How long does it take to write down the current clock counter?
This question is important in assessing a source of overhead, also called tracing, that might be present in the testing. In other words, if one system takes 20\(\mu\)s longer to write down the current clock time and then in a later test, that system tool 20\(\mu\)s longer than the other to perform a task, then it highly probable that both systems completed that task in the same amount of time.
Thread Tests
The thread tests focusing on scheduling behavior, i.e. the qualitative tests, seek to answer the following:
If a lower priority thread is created, is it deactivated until the creating thread completes?
If a thread is created with the same priority, is it placed at the head or tail of the queue?
If the creating thread yields after creating a thread with the same priority, does the created thread run?
If the created thread has higher priority, does it immediately run?
These qualitative tests are used to ensure that the RTOS is not violating the expectation that the highest priority task is running at any given time, and also to note the behavior of where new tasks of the same priority go. The benchmarking tests, i.e. the quantitative tests, for thread management timings seek answers to:
How long does it take to create a low priority thread?
How long does it take to create a high priority thread?
How long does it take to switch between threads?
These quantitative tests are important to assess the boundedness of the system tasks so that Real-Time application designers can know how long the different processes will take. Methods such as Compositional Performance Analysis can then be used with these system task bounds to establish bounds on entire processes by summing up the bounds of the constituent components/ functions used in the task chain(Casini et al. 2019). Understanding how long thread switching and creation takes also informs the system designer how much of a performance impact modularizing a process would cause. For instance, if it takes 1 millisecond to create a new task, then it would be important to minimize the creation of tasks, and thus creating much larger single-task processes. Further, if it takes 1 millisecond to swap between tasks then it would have a similar effect–reduce the number of tasks to minimize the need to switch between tasks.
Apart from the thread behavior tests, they also propose a priority inversion test to ensure that the scheduler is robust enough to prevent violating the “highest priority is always running at a given time” principle when resources cause higher priority threads to get blocked. See Section [sec:rtospriority] for more information on Priority Inversion.
Mutex Tests
Zhang and Timmerman also propose a slew of mutex object benchmarking tests which involves answering:
How long does it take to create a mutex?
How long does it take to destroy a mutex?
How long does it take to acquire a mutex that is not contended?
How long does it take to acquire a mutex that is contended?
How long does it take to release a mutex?
Similarly for the thread tests, these are important to ensure the boundedness and time scale for these processes so that applications can be thoroughly analyzed.
Semaphore Tests
The qualitative test they propose for the semaphore consists of ensuring that threads are only blocked from executing if semaphore counters are zero. This test consists of first trying to wait on a semaphore that is zero, blocking if the system is running properly. Then the thread signals the semaphore (for this part it has been reset back to zero) \(N\) times, in our case 3, and then waits on the semaphore \(N+1\) times, 4 times in our case. The thread should only block at the last signal since the counter should only have returned back to zero at that point.
Apart from these qualitative tests of the semaphore, the quantitative tests for the semaphore are:
How long does it take to wait on a semaphore?
How long does it take to signal a semaphore?
How long does it take to signal a semaphore that has a non-zero value?
The last two are distinct since non-zero semaphore counters imply that no threads are waiting on the resource, since if they were they would be executing. Thus, a scheduler can take advantage of this assumption and sidestep needing to reschedule tasks after increasing the semaphore’s value beyond zero.
Another two quantitative tests that are mentioned but are dismissed as unimportant for semaphores are the times to create or destroy a semaphore. This is dismissed since semaphores are typically only created statically upon startup rather than dynamically over the runtime(Zhang et al. 2021). In Jobbed, there is no dynamic memory allocation2, thus semaphores are not dynamically created or destroyed.
Additional Tests
These slew of tests are important in assessing the bounds upon the different scheduling/ concurrency processes that are crucial for the operating of an RTOS. They are also important to assess that the behavior of these critical components follow the behavior expected of an RTOS rather than a general purpose operating system. The priority inversion test is an example of a crucial behavior that is not always upheld in a general purpose operating system but is crucial for ensuring the determinism of an RTOS. The Mars Pathfinder is a notable example where Priority Inversion caused the system to reset errantly(Reeves 1998).
Priority Inversion[sec:rtospriority]
Priority inversion is the condition when a scheduler causes a lower priority thread to finish before a higher priority thread. For example, let \(L\) be a low-priority task that has access to a resource \(R\) and \(H\) be a new high-priority task that wants access to \(R\). In this case, \(H\) gets blocked by \(L\) until \(L\) releases \(R\). If there is a medium-priority task \(M\), \(M\) is executed before execution returns to \(L\) to release this signal. This provides a source of non-determinism for the execution of \(H\) and also means that \(M\) gets executed before \(H\). To solve this issue, a scheduler must let \(L\) run until it releases \(R\) so that \(H\) may finish executing before \(M\) finishes executing3.

Figure 1 showcases the priority inversion condition. In the figure, C refers to the thread being created and ran, the ‘Add’ blocks are when \(T_1\) creates \(T_2\) and \(T_2\) creates \(T_3\), and the number associated with the thread implies its priority (higher number means a higher priority in the figure). Thus, we see that \(T_2\) completes before \(T_3\), which is characteristic of priority inversion.
The reason why this is important is that there can be any number of threads with priority \(M\), which means that there is a source of non-determinism for the wait time of \(T_3\) since they would all need to complete in a naïve scheduling scheme.
Deadlock
Another test that is important in evaluating an RTOS is how does it deal with a deadlock condition. Deadlocks occur when tasks try to lock the same resources which then causes both of the threads to block, which then removes the condition for them to continue executing. For example, let \(T_1\) initially access \(R_1\) and \(T_2\) initially access \(R_2\). Then, a deadlock would occur if \(T_2\) tries to access \(R_1\) and gets blocked, allowing \(T_1\) to run which then tries to access \(R_2\), and is then blocked by \(T_2\). In this situation, no thread can relinquish control of their resource to allow the other thread to complete or other threads to access these resources.

Figure 2 showcases one way a naïve scheduler may be susceptible to a deadlock. In the figure, C refers to the thread being created and started, the yellow background refers to the labeled resource trying to be locked by the process, and the orange A refers to thread one (A)dding \(T_2\), which has higher priority than \(T_1\). Since both threads have a resource required by the other, they both cannot continue to execute–i.e. they cannot release the resource to allow the other one to continue.
Thus, it is important to test Jobbed and ensure that sequences that are topologically similar to this do not cause threads to become indefinitely locked.
Stimulus Responsiveness Tests
Real-Time Operating Systems are used in environments where the system needs to respond to real-world conditions, or stimuli. These stimuli can come from a variety of sources, from temperature sensors, collision detectors, and so much more. In order to test the responsiveness of the systems, we will send GPIO pulses with periods ranging from 20\(\mu\)s to 2ms. The wide variability in pulse periods is to determine each system’s behavior to slow and fast pulses, as well as show the threshold for predictable execution times of each system, if there is a threshold behavior expressed in either system. Using the difference between the real pulse length and the system’s observed pulse length, we will be able to bound the accuracy of the system for different pulse speeds. This pulse jitter is useful for RTOS Application Designers to determine if an operating system can accommodate their application. In other words, if their system is sensitive to jitter above 20\(\mu\)s and one of the systems has bounds that go above this level for the necessary speed, then it would not make sense to use that OS for the prospective system. On the other hand, if the OS can provide jitter bounds that fall below this threshold, then the system may be a viable candidate to use for the real-time system.
Delayed Execution Tests
Real-Time Systems also interact with a wide variety of processes, some of which may depend on executing tasks after a certain time period has passed. One example would be if the system sends a command for a substation to increase its output, it may add a 10s delayed call to then request the current production to ensure that the substation is increasing its production, and may also request additional state information like the temperature and if it is in the increase production state in the same call. In order to test the system’s ability to delay executing a requested function, a user space application will request a specially tailored callback function to run \(n\) \(\mu\)s later, where \(n\) is set to a value between 10\(\mu\)s to 10ms and with each test at a constant \(n\). The callback being run at the end of the 10\(\mu\)s to 10ms delay will be set to write down the current time, thus the time it starts executing, and then will compute how much time has elapsed between the request and execution of the callback. Using the difference between the computed delay and the requested delay across multiple tests will give bounds to the jitter of delaying a process’s execution, similarly to the stimulus responsiveness tests. The RTOS Application Designer can then use the jitter bounds of each system as a test of viability of the operating system for the particular task.
Algorithmic Overviews of Jobbed
Memory Management - Static Objects
Jobbed employs a static memory layout rather than a randomly assigned memory layout, i.e. it does not implement the Kernel Address Space Layout Randomization that is present in many general purpose and Real-Time operating systems. This security feature is one of the features that may be implemented in a future release (see [sec:futurework] Future Work). The lack of this randomness allows some Operating System procedures to be marginally quicker since the address space is statically assigned.
Dynamical allocation of memory is generally non-deterministic for shared memory multiprocessing, and so memory for tasks must be defined at compile-time(Wilson et al. 1995). This prevents both the nondeterministic implementations of memory allocation as well as also sidesteps any memory leakage that can occur in dynamic allocation schemes.
Due to the static allocation of objects and threads, the maximum number of threads and system-managed mutexes can be determined at compile time. Given that the Raspberry Pi 2B has 1GB of ram, the absolute number of threads and mutexes are constrained since the threads take up the determined stack size (4K in the default setting) and both take up \(N_T\cdot\)9 bytes and \(N_M\cdot\)2 bytes for the base structure plus \((N_T+N_M)\cdot\)3 bytes for the queue entries. Therefore, the total space taken up by the Threads and Mutexes are \(N_T\cdot4107+N_M\cdot5\) bytes. This calculation can then be used to determine if Jobbed can accommodate a prospective Real-Time application’s memory footprint.
Scheduler
Jobbed’s scheduler consists of 5 key components:
A pointer to the currently running thread
Each priority’s queue of threads that are ready to run
Each priority’s queue of threads that are waiting on a mutex
Each priority’s queue of threads that are waiting on a semaphore
A queue of all of the unused, i.e. free, threads
The access to the currently running thread provides faster context switching times since the context switcher can load the address and context information much faster.
The usage of a queue structure allows new threads to be easily obtained, added, and then removed when finished. Another approach to finding unused threads would be to have a fixed region of memory of threads and an array or bitfield to determine if that thread is being used. While this ensures an upper bound to finding a new thread, this approach would provide increasingly long execution times as more threads are removed from the list. On the other hand, the queue approach utilizes structure so that a new thread can be obtained from removing the entry at the beginning of the queue and can be returned to the end of the free queue when finished.
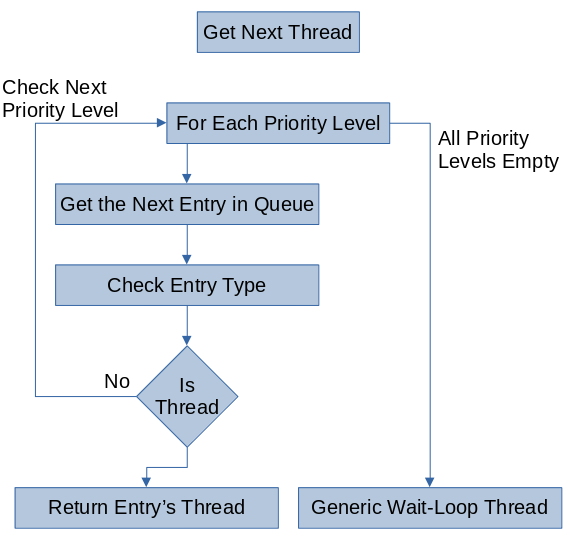
Additionally, the queue structure allows the next running task to be found in \(\mathcal{O}(p)\)-time at worst case, where \(p\) is the number of priorities assigned at compile time, since the first element can be queried in each queue to determine if the queue is empty.
It is also important to note that in Jobbed, a lower priority number in the scheduler implies a higher priority, since it will be indexed first from the queues. In the rest of this paper, I will be using a higher number to imply a higher priority but the implementation is the reverse case.
Thread Switching
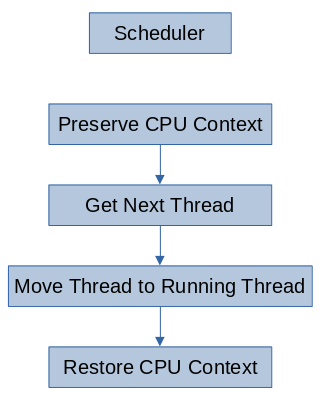
The thread switching algorithm, i.e. the scheduling algorithm, is fairly basic. It preserves the current context, gets the next thread, and then restores the new threads context. For the Raspberry Pi 2B, i.e. a ARMv7-A system, a threads context consists of five main components: the current value of the program counter, the current stack pointer, the current linking register (i.e. the return address of the current function), the current program status register, and the general-purpose registers r0-r12. Preserving these contexts involves adding the general-purpose register values to the stack and storing the special components in the Thread’s structure managed by the scheduler.
Getting the next thread involves peeking at the top of each queue to see if the queue of that priority is full. At the worst case, all of the queues are empty and so a special thread, an infinite loop waiting task, will be added as the running thread while the scheduler waits for a new thread to run. Otherwise, it will have found an non-empty queue and return the reference to the queue’s ready thread. Further, if the current thread is the highest priority of the ready threads, then this search will return the currently running thread and so it will continue executing.
Moving the next thread to the running thread involves overwriting the currently running thread pointer to the new thread’s pointer. Since the old thread’s context has been preserved and it still remains in the running list for its priority, it will be executed after the higher priority threads are finished as if it had not been preempted.
Thread Creation
Jobbed allows threads to be created with one argument and a given priority. The algorithm to add a thread to the priority \(p\)’s ready list is:
Get a thread from the free-list
If the thread is NULL, exit with an error
Otherwise
Initialize the given thread’s entry
Set the priority, program counter, and argument
Add it to the priority \(p\)’s queue
Mutex Creating
The Mutex Locking algorithm that Jobbed implements does the following:
Gets the next available Mutex object, removing it from the free queue
If the next available Mutex object is null, return an error
Otherwise
Clear the lock value
Set the Mutex’s resource reference to the given address
Add it to the in-use mutex queue
Return the mutex’s handle to the caller
Since the kernel’s Mutexes are created at compile time, it is important to setup the system with enough Mutexes for the workload so that the error condition does not occur.
Mutex Locking
The Mutex Locking algorithm Jobbed implements does the following:
Checks the Mutex’s lock value4
If the lock value is non-zero, i.e. a thread is accessing it, block the calling thread and then call the scheduler
Otherwise, store the currently running process’s pid to the lock
Semaphore Waiting
The Semaphore Waiting algorithm that Jobbed implements is similar to the Mutex lock and does the following:
Checks the Semaphore’s value5
If the Semaphore’s value is zero, block the calling thread and then call the scheduler
Otherwise, decrement the value and store it back into the semaphore
Mutex Releasing
The Mutex Releasing algorithm is:
Unlocks the mutex
Searches through the mutex wait queues for the first thread that is waiting on this mutex
If there is one, moves it to the ready queue and immediately calls the scheduler
If there is not one, it returns to the running task
Semaphore Signaling
The Semaphore Signaling algorithm is:
Increments the semaphore’s value
If the semaphore was 0, it calls the scheduler
If the semaphore was non-zero, it returns to the running task
The non-zero case means that the resource already had a resource that could be consumed, and so no threads will be waiting on it.
Jobbed also implements a second Semaphore Signaling algorithm, allowing a process to increase the semaphores value by an arbitrary amount, \(N\). This is so that processes can signal that they have ‘produced’ many consumables without having to call the increment \(N\) times manually. In this case, the signaling algorithm is:
Adds \(N\) the semaphore’s value
If the semaphore was 0, it wakes up to \(N\) tasks that are waiting on that semaphore and then it calls the scheduler
If the semaphore was non-zero, it returns to the running task
Priority Inversion Prevention[sec:priority-inversion]
In order to combat priority inversion, Jobbed’s scheduler promotes the lower priority blocking thread to the priority of the high priority thread temporarily, and then returns it to the original priority once the resource has been released. This process is called Priority Inheritance and is one way to solve the Priority Inversion problem(Sha, Rajkumar, and Lehoczky 1990).
Deadlock Prevention - Eliminating Cyclic Wait
There are four conditions required for a deadlock: exclusive access to the resource, resources can be held and waited upon, processes do not give up the resource until they are finished, and each waiting process forms a cyclic dependency graph(Silberschatz, Galvin, and Gagne 2006). Since deadlocks only occur when two threads have one resource and request the resource of the other, they establish a cycle. In order to prevent this from occurring, Jobbed gives each resource an ordering, and so it gives it an implicit numbering from the index in the queue, and ensures that resources can only in decreasing number. This means that when one of the threads tries to access a resource, it must first temporarily release the previous resources so that any other higher priority threads that want that resource can grab the resource as it gets released. Therefore, when accessing resources it is important to declare all of the resources needed for the critical section, the sections where exclusive access to a resource is necessary, before proceeding so that the scheduler can assure the exclusive access(Marwedel 2010).
Interrupts and Delayed Execution
Jobbed provides a subscribe_irq function that takes the requested Interrupt(IRQ), a callback function, and a pointer to the IRQ-specific parameters, such as priority level of the IRQ handler or the time to delay before executing the callback. Currently, Jobbed implements the following IRQ handlers6:
UART - for handling data received on the UART pins
GPIO - for rising edge triggers on requested pins
Local Timer - For the system’s count-down timer
System Timer (x4) - One for each of the System Timer’s compare registers, which can be used to delay the execution of the requested callback to \(n\) \(\mu\)s later
These interrupts allow the system to collect incoming stimuli from its environment as well as delay the execution of requested procedures to a later time.
Jobbed’s interrupt handler does the following for each supported interrupt, continuing to the next interrupt type if any listed condition is not met:
Checks if the interrupt has a callback
If it has a callback, checks if the interrupt is active
If the interrupt is active, adds the callback to the requested priority queue with any data
Additionally, if the interrupt was one of the system timer interrupts, it checks to see if the callback is a one-shot timer or a periodic timer. If it is periodic, it uses the original delay specified when the user subscribed the timer to determine the next compare value. Because of this behavior, periodic and one-time delayed executions have the same jitter timings.
Evaluation against Linux
Now that the RTOS tests have been established and Jobbed’s core functionality has been discussed, we will see how it compares to Raspbian, the Linux Operating System for the Raspberry Pi. Both systems were tested on the same Raspberry Pi 2B (v1.1) and in an unloaded state so that their core functionalities can be accurately bounded. In each of the tests, the thread policies for Raspbian were set to Real-Time FIFO policies to ensure that it is using the Real-Time Scheduling Mechanisms, and so the analysis can be accurately compared for prospective Real-Time Applications.
Quantitative Results
Each test results comes from 4096 benchmarking samples.
| Test | Linux | Jobbed | ||||
|---|---|---|---|---|---|---|
| In nanoseconds: | Avg | \(\sigma\) | Max | Avg | \(\sigma\) | Max |
| Tracing | 238 | 160 | 2920 | 287 | 452 | 1000 |
| Thread Creation (L) | 96600 | 26100 | 825000 | 1880 | 967 | 5000 |
| Thread Creation (H) | 221000 | 56500 | 1470000 | 2660 | 887 | 7000 |
| Thread Switch | 15400 | 625000 | 40000000 | 1420 | 742 | 4000 |
| Mutex Create | 317 | 1040 | 41400 | 561 | 595 | 3000 |
| Mutex Destroy | 321 | 1300 | 45100 | 576 | 585 | 3000 |
| Mutex Lock (C) | 23700 | 6950 | 206000 | 4910 | 1020 | 9000 |
| Mutex Lock (NC) | 365 | 309 | 8440 | 798 | 597 | 3000 |
| Mutex Unlock | 400 | 782 | 50100 | 1370 | 572 | 4000 |
| Semaphore P | 391 | 1550 | 95800 | 427 | 495 | 1000 |
| Semaphore V | 2550 | 125000 | 7860000 | 768 | 421 | 1000 |
| Semaphore V (NZ) | 313 | 223 | 11700 | 439 | 496 | 1000 |
As a first note, the tracing results, i.e. the amount of time it takes to write down the time, were very similar amongst both machines. The most accurate timer on the Raspberry Pi 2B is the system timer, which returns \(\mu\)s values(Broadcom 2012; Loo 2014). Other timers available on the system are the ARM timer and the cycle counter. The ARM timer is derived from the system clock and so it can change its timing dynamically(Broadcom 2012). The system cycle counter can be used to infer the amount of time that has passed but is not completely accurate below 1\(\mu\)s(Broadcom 2012). Linux utilizes these other timers to infer below the 1\(\mu\)s resolution provided by the most accurate timer, and thus allow it to report sub microsecond times but these measurements are only holistically accurate within a microsecond. Despite this slight difference in timing method, the average tracing time was roughly the same and had deviations below 1\(\mu\)s and so the tracing time will not be a significant factor to differences in the results.
Thread Results
In all of the Thread results, Linux had higher average runtimes, wider deviations in runtimes, and much larger maximum runtimes than Jobbed. There are many contributing factors to these much larger latencies, most notably are: ASLR, parent-child relationships, multiple scheduling policies, dynamical allocation of the thread’s stack space, copy the parent thread’s attributes, and setting given attributes. The ASLR was mentioned earlier, which means that the Linux system has its address space randomized which may contribute a small part to the discrepancy. Linux also allows threads to spawn child threads, cloning the attributes of the parent thread. Jobbed on the other hand treats every thread as a standalone process and does not utilize child processes in order to ensure a more deterministic system. Linux also contains many more attributes than Jobbed, such as the scheduling policy for that particular task. These extra attributes are derived from POSIX standards, which are highly general standards for general operating systems. This generality means that the standard implements attributes that are not employed in real-time systems, where the requirements are much stricter and specific. Linux also implements a multitude of different scheduling policies are also not present in Jobbed. Jobbed does not support the multitude of different scheduling policies since the system is Real-Time and so it must employ deterministic scheduling behaviors. The dynamical allocation of the thread’s stack is another large component of this latency since the Linux kernel must find a stack space for the new thread, whereas that is statically determined in Jobbed. During this dynamical allocation of the stack, the MMU must also be updated to ensure that the process will have privileges to this stack and also the Linux system initializes stack guards for the process to determine if the stack has been overrun, which contributes to larger overhead.
The maximum runtimes for Jobbed were much smaller, being on the order of microseconds whereas the Linux benchmarks were around the order of milliseconds. This large bound indicates that the execution times do not have a bound, and thus are nondeterministic on Linux.
Mutex Results
For the Mutex creation and deletion tasks, the average runtime and standard deviation is comparable between the operating systems, being less than a \(\mu\)s, but maximum runtime for Linux was much larger than in Jobbed. In the case of the average runtime, Jobbed was marginally slower which is most likely due to the fact that it moves a system managed entry to a list whereas Linux’s Mutex object was created at compile time of the process. Because of this static allocation, Linux’s mutex creation/deletion, or initialization/destruction since the mutex already exists, is marginally faster but still within 1\(\mu\)s. The deviations are also within a microsecond, in favor of Jobbed, and so the discrepancy may be due to the slight ambiguity in these sub-microsecond measurements. The larger maximum time hints at the non-determinism of the Mutex creation/ destruction on Linux.
The non-contended lock and unlock tests also have Linux as marginally faster (within a microsecond) on average. The deviations were comparable, with Jobbed being less than a microsecond larger for the locking and Linux being less than a microsecond larger for the unlocking. The largest differences were in the maximum times, where Linux took longer than 3\(\mu\)s longer to lock a non-contended mutex and 46\(\mu\)s longer to unlock a mutex when comparing the longest execution times. This major discrepancy is another indication of the non-determinism of the Linux system.
The contented lock on Linux was roughly 19\(\mu\)s slower on average than Jobbed, had a wider standard deviation, and the longest execution time scenario was roughly 196\(\mu\)s slower. This large upper bound is also indicative of the unboundedness to the execution of the process, hence implies that the Raspbian Operating System contains non-deterministic processes.
Semaphore Results
The semaphore wait had comparable execution times, with Linux being less than a microsecond faster on average, with a wider deviation (roughly 1\(\mu\)s wider), and 94\(\mu\)s slower than Jobbed in the longest execution case. Since the average execution times are below a microsecond in their difference, the average case is not significantly different but the larger maximum further highlights the wider bounds, if any, on Linux.
The semaphore signal when the semaphore is non-zero (NZ) to start are roughly comparable as well, with Linux being less than a microsecond faster, having less than a microsecond narrower deviation, but having a 10 microsecond slower longest execution case. As with the before test, the average and deviations in the times are less than a millisecond and so they are not significantly different. The main difference is that Linux’s longest execution case has higher bound than Jobbed.
The big difference comes from signaling a semaphore that has a zero counter. In this case, Jobbed runs faster by more than a microsecond on all three metrics. In the case of the longest execution case situations, Jobbed runs 7.86 milliseconds faster than Linux, which further highlights the non-determinism of Linux’s semaphores. Apart from the longest execution case, the average execution time is roughly 1.7 microseconds slower on Linux but the standard deviation of the average is 124 microseconds wider. In this case, Jobbed’s semaphore signaling performs way better than Linux and has a much tighter bound.
Overall RTOS Test Results
From the quantitative results, we see that when Jobbed is slower on average it is within 1\(\mu\)s of Raspbian. On the other hand, there are 4 results for Raspbian that are slower than Jobbed and exceed 14\(\mu\)s difference in average execution time. Further, Jobbed’s deviation follows the same pattern, staying within 1\(\mu\)s of Raspbian when it is slower but the converse is not always true.
The most obvious discrepancies are for the maximum execution times, where Jobbed always has a smaller upper bound on the execution of the various processes, three of which are faster by at least 1 millisecond.
GPIO Quantitative Test Results
Other than the standard RTOS tests, we also tested both Linux and Jobbed’s ability to respond to fast and slow sequential GPIO pulses. To generate these 20\(\mu\)s to 2ms pulses, we attached pin 13 of an ARDUINO Uno to the 16th GPIO pin of the Raspberry Pi and had both systems create callbacks for rising edge events on that pin. We also include the minimum execution times to highlight Linux’s lower bound behavior.
| Test | Linux | Jobbed | ||||||
|---|---|---|---|---|---|---|---|---|
| In microseconds: | Avg | \(\sigma\) | Min | Max | Avg | \(\sigma\) | Min | Max |
| 20\(\mu\)s pulse | 68 | 39.3 | 55.7 | 1230 | 25 | 1 | 22 | 32 |
| 40\(\mu\)s pulse | 67.9 | 45.6 | 58.1 | 2240 | 45 | 1 | 43 | 52 |
| 160\(\mu\)s pulse | 167 | 23.5 | 76.3 | 999 | 166 | 2 | 163 | 174 |
| 1ms pulse | 1020 | 359 | 620 | 24000 | 1010 | 1 | 1000 | 1020 |
| 2ms pulse | 2040 | 865 | 255 | 57100 | 2030 | 1 | 2010 | 2040 |
These tests were performed on systems that were unloaded and prioritized the requested GPIO pin rising edge callback. In all cases, Jobbed’s average, best, and longest execution case timings were better than Linux’s and also had a significantly smaller deviation across the 4096 samples. Additionally, from Linux’s minimum time on the 40\(\mu\)s pulse, we see that Linux incurs at least 18\(\mu\)s overhead for handling the pulse. We also see that the 20\(\mu\)s and the 40\(\mu\)s have similar results on the Linux system, indicating that we have started to hit a responsiveness threshold for GPIO pulses around the 68\(\mu\)s range. Further, Linux’s responsiveness to the slower 2ms pulse has a minimum of 255\(\mu\)s, which is well below the period length of 2ms. This in conjunction with the fact that the maximum took 57ms indicates that Linux is missing some of the longer pulses, and so the elapsed time can widely vary, leading to abnormally fast and slow pulse length readings. On the other hand, Jobbed’s handling of the pulses has a range of around 10\(\mu\)s for short pulses and 37\(\mu\)s for longer pulses. The difference for the longer pulse is due to the system going into a reduced power mode, due to the wfe idling, while waiting for an event to occur. Jobbed’s tighter bounds further emphasize the benefit of using Jobbed for real-time processes over Linux since it is able to recognize each pulse in the 20\(\mu\)s-2ms range, whereas Linux shows that it may miss pulses for long lengths and it has a minimum semi-consistent pulse length of around 68\(\mu\)s.
Delayed Execution Test Results
| Test | Linux | Jobbed | ||||||
|---|---|---|---|---|---|---|---|---|
| In microseconds: | Avg | \(\sigma\) | Min | Max | Avg | \(\sigma\) | Min | Max |
| 10\(\mu\)s delay | 690 | 89.2 | 610 | 1560 | 10.3 | 0.925 | 8 | 14 |
| 20\(\mu\)s delay | 464 | 90.7 | 383 | 1410 | 20.4 | 0.975 | 18 | 24 |
| 50\(\mu\)s delay | 729 | 79.3 | 642 | 1770 | 50.4 | 0.963 | 48 | 54 |
| 100\(\mu\)s delay | 781 | 76.0 | 697 | 1600 | 100 | 0.853 | 98 | 104 |
| 200\(\mu\)s delay | 897 | 160 | 800 | 9770 | 200 | 0.789 | 198 | 204 |
| 500\(\mu\)s delay | 1330 | 98.5 | 1130 | 2150 | 500 | 0.935 | 498 | 504 |
| 1ms delay | 1860 | 124 | 1640 | 2840 | 1000 | 0.896 | 998 | 1000 |
| 5ms delay | 6010 | 178 | 5670 | 14800 | 5000 | 0.875 | 5000 | 5000 |
| 10ms delay | 11000 | 122 | 10700 | 12300 | 10000 | 0.915 | 10000 | 10000 |
These tests were performed on systems that were unloaded and prioritized the requested delayed callback. Much like the GPIO tests, we see that Jobbed performs better on all accounts in comparison to Linux. We especially see that Linux struggles to consistently hit delays below 500\(\mu\)s and at higher delays it incurs roughly an additional 1ms delay. On the other hand, Jobbed’s bounds range within 4\(\mu\)s from the requested time across the entire 10\(\mu\)s to 10ms range and has an average close to the expected value and with a standard deviation below 1\(\mu\)s.
Priority Inversion Test
The other main behavior comparison test is to check both Operating Systems for the Priority Inversion execution condition laid out in Figure 1.
In Jobbed execution proceeded in the following manner:
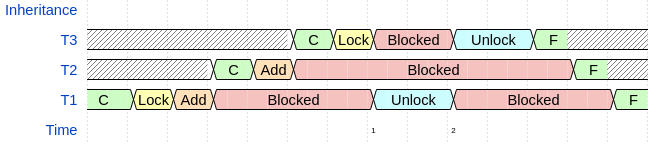
As mentioned in section [sec:priority-inversion], Jobbed employs priority inheritance, where the process that is responsible for blocking a higher priority process is elevated to the higher priority’s permission until the contended resource is released. As we can see in Figure 3, when \(T_3\) tries to lock the resource at time, it gets blocked and \(T_1\) begins to run. In this case, \(T_1\)’s only task is to unlock the resource, and when the resource is unlocked, \(T_1\) gets re-blocked and \(T_3\) continues to execute. Then, when \(T_3\) is finished, \(T_2\) finishes and then \(T_1\) finishes, thus the threads finished in priority order, which prevents the Priority Inversion condition. Therefore, Jobbed is not susceptible to priority inversion.
On the other hand, when running this process 4096 times on Linux, we saw the same execution completion order: 213. This indicates that not only the medium priority task finished before the high priority task, but also that the low priority task continued to execute despite releasing the resource that the higher priority task required to continue. In a general purpose operating system, this out-of-order execution is not as bad since tasks are not assumed to have hard deadlines or have a preferred execution order. For a Real-Time System, deterministic execution chains are important and so it is imperative that the tasks always finish in the 321 order, which was never observed on the Linux tests.
Qualitative Evaluation of Jobbed
The following tests are more general tests of the RTOS and so it does not make as much sense to evaluate them versus Linux. The main reason the Priority Inversion Qualitative test was evaluated on the Linux system was to highlight the non-determinism present on the OS.
Thread Prioritization Analysis
In section [sec:rtoseval], we had also mentioned that the tests important for an RTOS include where it places threads of the same priority, and if a low priority thread is created, is it blocked until the higher priority threads are finished?
To test both of these cases, we had the medium priority thread \(T_2\) in the priority inversion test create a thread \(T_4\), with the same priority as \(T_1\). In all of our runs, \(T_4\) completed after \(T_1\) completed, verifying that new threads of the same priority are placed at the TAIL of the queue and that new threads are blocked from running until there are no higher priority threads.
The qualitative tests also included testing if higher priority threads are immediately run after creation, which is shown in the priority inversion test, and the last test seeks to determine if a thread yields and has the same priority as another thread, is the other thread ran. In our testing, and from how Jobbed was written, when two threads share the same priority and one yields, it is placed at the tail of the queue and so the other thread is allowed to run.
Thus, the qualitative tests are successfully completed by Jobbed, and in a way consistent with RTOS assumptions.
Deadlock Test
When running the Deadlock Test we got the following execution path:
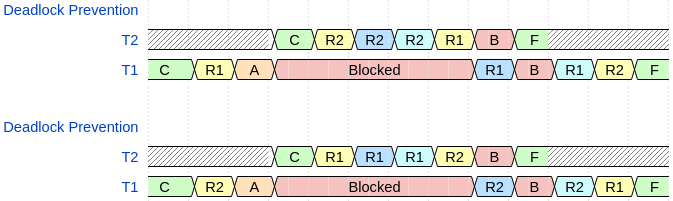
The purple UR1 and UR2 means that the thread unlocks R1 or R2 respectively. The A indicates that \(T_1\) creates \(T_2\). The darker blue means that the mutex lock call automatically unlocked the resource and the lighter blue means that the mutex lock call automatically relocked the resource. Specifically in our diagram, the dark blue R2 in the second timing diagram indicates that the system mutex manager automatically unlocks R2 when T2 is trying to acquire R1, in order to see if any higher priority threads are waiting on R2. Since no higher priority threads are waiting on R2 it is also automatically relocked, shown by the lighter blue R2. Similarly, the dark blue R1 in the second timing diagram indicates that the system mutex manager automatically unlocked R1 when T1 is trying to acquire R2 in order to see if any higher priority threads are waiting on R1. In this case, T2 is waiting on R1, so it wakes up and completes its task. Execution then resumes on T1 and it is able to relock R1 and then successfully acquire R2, with the deadlock prevented.
Thus, the implicit unlocking prevents the tasks from establishing a complete cycle, eliminating one of the necessary conditions for a deadlock(Silberschatz, Galvin, and Gagne 2006). RTOS application designers should then ensure that they are locking all of the resources they need in each critical section at the beginning of the critical section. I.e. if a task needs a printer and a copier in one section, they should reserve them at the beginning of that section. Further, if they have another section where they don’t need the copier but also need a UART connection, they should reserve those at the beginning of this other critical section. This approach ensures that Jobbed’s managed mutexes are not susceptible to the deadlock condition.
Semaphore Signaling Test
In Section [sec:rtoseval], the semaphore test was proposed in order to ensure that the semaphore only blocks threads when it can provide no more resources, i.e. when its counter is zero. In our experiments, Jobbed’s execution path was (with the semaphore initialized to zero):

Thus, we see that \(T_2\) was only blocked when the semaphore counter was zero, after the first P and after the fourth P in the series of sequential Ps. This is consistent with the expected behavior of a semaphore in an RTOS, ensuring the determinism of Jobbed’s semaphores.
CPSR Preservation Test
One of the context preservation mechanisms that are more difficult to directly measure is the CPSR. Ensuring that the program counter, stack pointer, and general registers is much easier since failures are typically spectacular. On the other hand, improperly preserving the CPSR may only cause a process to take a different execution path in very rare cases, causing cryptic errors. This rarity is generally be due to the natural grouping of compare and branch instructions, leaving a small surface for preemption to express this failure condition. In order to test that the scheduler properly stores and then restores the thread’s CPSR upon preemption, we performed the following test, using ARM Assembly to ensure that the compare and branch instructions were separated by a context switch:
Set register 0’s value to 5
Compare register 0’s value with 5
Add a higher priority task, preempting the current thread
Set register 0’s value to 5
Compare register 0’s value with 4
End task
If r0 == 5, i.e. the CPSR’s zero flag is set, output ‘Y’
Otherwise, i.e. the CPSR’s zero flag is not set, output ‘N’
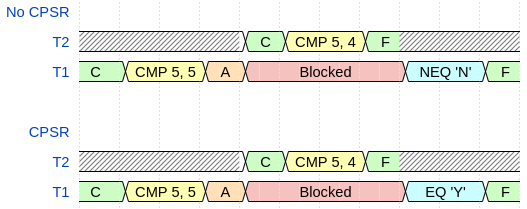
Figure 6 shows the two execution possibilities of the test. The first timing diagram, labeled No CPSR, shows that if the CPSR is not preserved then upon returning to \(T_1\) the Not Equal branch will execute and ‘N’ will be output since \(T_2\) altered the zero flag. The second timing diagram, labeled CPSR, shows that if the CPSR was preserved then upon returnint to \(T_1\) the Equal branch will execute and output ‘Y’ since the zero flag will be restored to \(T_1\)’s state before the thread switch occurred.
Jobbed passed this test and output ‘Y’ for all runs of this test, proving that the CPSR was successfully saved and restored upon returning to the thread. If the CPSR was not properly set, the second thread’s CPSR would have cleared the zero flag since 5\(\neq\)4 and so the original thread would have output ‘N’ in all tests, which would indicate a source of non-determinism since the flags would not be assured to stay constant over the execution of the thread.
Future Work[sec:futurework]
In order to strengthen the security posture of this system, security features such as Address Space Layout Randomization and user stack guards are being explored so that any systems that are in an insecure network or contain insecure process routines can be hardened against potential exploits that take advantage of the static layout of the system. Apart from the security features, future work will be focusing on implementing deterministic drivers for the different peripherals of the system such as SPI, I2C, Ethernet, USB, and SD filesystem drivers. In addition to the drivers for these different peripherals, including any supported IRQs are also being focused on so that these peripherals can generate interrupts that can be turned on from the userspace if requested. These are important so that the full range of the Raspberry Pi can be used in the RTOS applications without developers manually writing these routines to get that functionality, and thus may introduce non-deterministic drivers to handle these processes. Putting these nondeterministic processes at the lowest priority level and putting tasks that depend on determinism/ bounded execution at higher priorities can ensure that these tasks do not conflict with critical components of the RTOS application.
Additionally, the boot process also provides the kernel with ATAG entries, which are currently ignored but are useful to get information about the hardware. Future releases are going to seek to use the ATAGS to get a more holistic picture of the system and can allow better tweaking of the execution based on them. This information includes things like how large the memory is, what type of board the system is on, and thus it can load code for different boards in the same compiled kernel7.img, etc.
Future releases will also explore waking up additional cores using the ARM Mailboxes for distributing loads and selecting cores to receive specific IRQ signals. Additionally, putting mutex queues on mutex objects rather than the scheduler will be explored to assess the space versus time costs of having mutex wait lists only on the scheduler versus on the mutex. In the same vein, this may also trigger an exploration into using a doubly linked list for the queues rather than a singly linked list for backwards traversal optimizations should the queues be put on individual mutexes rather than the scheduler, and also make removing specific queue items quicker.
Future non-RTOS specific contributions that are being explored involve making much more syntactic sugars for RTOS developers to easily specify deadline and jitter conditions with try-catch blocks for different latencies.
Conclusion
From autonomous vehicles to flight controllers, Real-Time Operating Systems are widely used due to their determinism, bounded execution times, and emphasis on low latency execution of operating system tasks. The Raspberry Pi 2B is a Cortex-A7 SBC that is popular due to its small form factor, low cost, and high performance for its cost. Current Raspberry Pi Operating Systems focus on the user experience, which emphasizes user-responsiveness, and adhere to a general-purpose operating system paradigm. In order to bring a Real-Time Operating System, we presented Jobbed and tested it on a wide variety of metrics to ensure it adheres to expected RTOS behavior, has tight execution bounds, and prevents system faults that naïve scheduling algorithms may introduce. We also compared Jobbed to Raspbian, the standard operating system for the Raspberry Pi with Real-Time Policies, to compare both system’s boundedness for tasks and average execution times. Through our testing, we show that when Jobbed is slower than Raspbian at a task, it is within one microsecond which is equal to the level of accuracy in timing the system. On the other hand, when Jobbed is faster than Raspbian, it is most often quicker by at least 10 microseconds, or much more. In addition, in all of the tests, we found that the longest execution case, execution times were always much smaller for Jobbed, and so it has a much tighter execution bounds, sometimes by milliseconds. When testing both system’s responsiveness to stimuli or ability to delay executing a callback to \(n\mu\)s later, we also found that Jobbed also had much tighter jitter bounds, and average executions that were comparable to the target pulse or delay. In the behavioral tests, we found that Jobbed achieves all of the expected behavior of an event-driven RTOS: the highest priority thread is running at any given time, it is resistant to priority inversion faults, and it prevents thread deadlock conditions by removing the cyclic wait condition. Thus, we found that Jobbed’s performance as an RTOS for the Raspberry Pi 2B provides a much better OS for Real-Time applications than the current OS for the Raspberry Pi, and fulfills the requirements for an RTOS.
Appendix
Useful Resources
https://www.raspberrypi.com/documentation/computers/processors.html
https://github.com/raspberrypi/firmware/wiki/Mailbox-property-interface#clocks
https://github.com/eggman/raspberrypi/tree/master/qemu-raspi2
https://github.com/rust-embedded/rust-raspberrypi-OS-tutorials
https://developer.arm.com/documentation/ddi0406/c/System-Level-Architecture/The-System-Level-Programmers--Model/ARM-processor-modes-and-ARM-core-registers/
ARM-core-registers?lang=enhttps://www.cl.cam.ac.uk/projects/raspberrypi/tutorials/os/index.html
https://medium.com/@thiagopnts/raspberry-pi-bare-metal-programming-with-rust-a6f145e84024
Where to get the Latest Release
The latest release, including the source, tests, and the current assembled binary, can be found on my website https://christiancunningham.xyz in the form of a Gzipped Tarball download link.
Using the Clock Cycle Counter to Benchmark Jobbed
| Test | Linux | Jobbed | ||||
|---|---|---|---|---|---|---|
| In nanoseconds: | Avg | \(\sigma\) | Max | Avg | \(\sigma\) | Max |
| Tracing | 238 | 160 | 2920 | 77.9 | 2.13 | 157 |
| Thread Creation (L) | 96600 | 26100 | 825000 | 744 | 48.1 | 2270 |
| Thread Creation (H) | 221000 | 56500 | 1470000 | 521 | 45.4 | 3100 |
| Thread Switch | 15400 | 625000 | 40000000 | 682 | 40.9 | 2150 |
| Mutex Create | 317 | 1040 | 41400 | 298 | 48.4 | 1300 |
| Mutex Destroy | 321 | 1300 | 45100 | 257 | 20.5 | 1290 |
| Mutex Lock (C) | 23700 | 6950 | 206000 | 2820 | 33.3 | 4430 |
| Mutex Lock (NC) | 365 | 309 | 8440 | 422 | 61.0 | 1400 |
| Mutex Unlock | 400 | 782 | 50100 | 430 | 3.96 | 540 |
| Semaphore P | 391 | 1550 | 95800 | 179 | 3.52 | 334 |
| Semaphore V | 2550 | 124000 | 7860000 | 421 | 4.32 | 1080 |
| Semaphore V (NZ) | 313 | 223 | 11700 | 179 | 3.05 | 190 |
As mentioned in the benchmarking section, the Raspberry Pi has an accurate counter and also provides things like a cycle counter which can infer the time taken for a process. The cycle counter can be used to infer the time taken for different processes, with a bit more inaccuracy, below 1\(\mu\)s. When using the Cycle counter on Jobbed, as it is used in Linux, the results for Jobbed only get better. I also obtained these results with 8192 samples for Jobbed.
Jobbed running in QEMU

Note: the benchmarking results listed above using the cycle counter or the system timer came from the results on the Physical Hardware since QEMU does not provide the accurate timings.
Testing Setup w/ Arduino and Push Button
Pictured above is the setup where the arduino is hooked up to pin 16 and a pushbutton is hooked up to pin 12 with an LED for manual verification of signal reception.
Allan, Alasdair. 2021. “The Config.txt File.” https://www.raspberrypi.com/documentation/computers/config_txt.html.
ARM. 2020a. “ARM Synchronization Primitives Development Article.” https://developer.arm.com/documentation/dht0008/a/swp-and-swpb/legacy-synchronization-instructions/limitations-of-swp-and-swpb.
———. 2020b. “ISAs, Comminality and Differentiation.”
———. n.d. “Cortex-A7 Mpcore Technical Reference Manual R0p5.” https://developer.arm.com/documentation/ddi0464/f/?lang=en.
Broadcom. 2012. “BCM2835 Arm Peripherals.”
Casini, Daniel, Tobias Blaß, Ingo Lütkebohle, and Björn Brandenburg. 2019. “Response-Time Analysis of Ros 2 Processing Chains Under Reservation-Based Scheduling.” In 31st Euromicro Conference on Real-Time Systems, 1–23. Schloss Dagstuhl.
David, Francis M, Jeffrey C Carlyle, and Roy H Campbell. 2007. “Context Switch Overheads for Linux on Arm Platforms.” In Proceedings of the 2007 Workshop on Experimental Computer Science, 3–es.
Foundation, Raspberry Pi. n.d. “Welcome to Raspbian.” https://www.raspbian.org/.
FreeRTOS. n.d. “What Is an Rtos?” https://freertos.org/about-RTOS.html.
Goodacre, John, and Andrew N Sloss. 2005. “Parallelism and the Arm Instruction Set Architecture.” Computer 38 (7): 42–50.
Insights, Global Market. 2021. “Single Board Computer Market Size.” https://www.gminsights.com/industry-analysis/single-board-computer-sbc-market.
Loo, Gert van. 2014. “Quad-A7 Control.”
Marwedel, Peter. 2010. Embedded System Design: Embedded Systems Foundations of Cyber-Physical Systems. Springer Science & Business Media.
Pounder, Les. 2021. “Pi in Short Supply: Site Claims 52-Week Wait for 4GB Model.” https://www.tomshardware.com/news/raspberry-pi-4-in-short-supply.
Reeves, Glenn E. 1998. “What Really Happened on Mars?”
Sha, Lui, Ragunathan Rajkumar, and John P Lehoczky. 1990. “Priority Inheritance Protocols: An Approach to Real-Time Synchronization.” IEEE Transactions on Computers 39 (9): 1175–85.
Silberschatz, Abraham, Peter Baer Galvin, and Greg Gagne. 2006. Operating System Principles. John Wiley & Sons.
Wiki, OSDev. n.d.a. “Raspberry Pi.” https://wiki.osdev.org/ARM_RaspberryPi.
———. n.d.b. “Raspberry Pi Bare Bones.” https://wiki.osdev.org/Raspberry_Pi_Bare_Bones.
Wilson, Paul R, Mark S Johnstone, Michael Neely, and David Boles. 1995. “Dynamic Storage Allocation: A Survey and Critical Review.” In International Workshop on Memory Management, 1–116. Springer.
Wirth, Niklaus. 1977. “Toward a Discipline of Real-Time Programming.” Communications of the ACM 20 (8): 577–83.
Zhang, Mingyang, Martin Timmerman, Luc Perneel, and Toon Goedemé. 2021. “Which Is the Best Real-Time Operating System for Drones? Evaluation of the Real-Time Characteristics of Nuttx and Chibios.” In 2021 International Conference on Unmanned Aircraft Systems (Icuas), 582–90. IEEE.
For some other Raspberry Pi models, they load kernel8.img, kernel7l.img, or kernel.img↩︎
The closest process is giving a thread a reference to a statically allocated mutex that is managed by the system↩︎
Or even starts executing if \(M\) is added after \(H\) starts↩︎
Using ARM’s Exclusive Monitor to ensure that the value hasn’t changed since accessing it↩︎
Using ARM’s Exclusive Monitor to ensure that the value hasn’t changed since accessing it↩︎
See [sec:futurework] Future Work for future IRQ handlers being explored such as GPIO falling edge, Ethernet packets, etc.↩︎